
Projects
SpaceBot Camp
The DLR SpaceBot Camp is a national robotic competition organized by the German Aerospace Center (Deutschen Zentrum für Luft- und Raumfahrt - DLR). The competition creates a standardized environment to solve tasks in the field of exploration of other planets. The communication with the robots is based on real conditions during a space mission. Hence, the robots need to perform the tasks autonomously. Read more (external German page)


'Robbie' Student Projects
Developing autonomous mobile systems is a complex task that involves aspects of mechanics, electronics as well as software engineering. The robot has to be able to evaluate data from multiple sensors and, based on this, interact with its environment. Students of Computational Visualistics and Computer Science have been tackling those challenges since 2005 in several "Robbie" projects.
Camera-based Vehicle Pose Estimation
[description forthcoming]
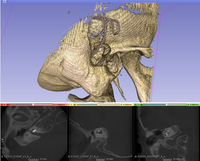
Model-based image segmentation of human cochlea
The Cochlea as important part of the inner ear and auditory system is responsible for transferring sound signals to the brain. Cochlea Implants are electronic devices that simulate the cochlea function. A successful cochlea implant surgery needs useful medical images to help doctors to decide many important parameters. Through the minute Cochlea structure, the required resolution for metric description is below the technical resolution of medical images e.g. CT and MRI. Read more (Projectpage MTI)
Multispektral
[description forthcoming]
Truck Track
[description forthcoming]
PAST PROJECTS

DFG Sensorfusion
In this research project, various algorithms are developed for calibration, classification, navigation, mapping and control in the realm of autonomous mobile outdoor robot. The developed robot for this research project is based on the Forbot robot platform. Furthermore, the robot is equipped with the 3D laser range finder Velodyne HDL-32.

I4MS-Gate
The project I4MS-Gate is a FP7 CSA that aims at multiplying the innovation impact of more than 160 European ICT for Manufacturing Experiments planned in the I4MS Programme (FORTISSIMO, CloudFlow, CloudSME, INTEFIX, APPOLO, LASHARE) Read more.
3D Semantic Mapping of Multi-level Buildings
In this project, various algorithms for 3D indoor and outdoor mapping of the active vision group have been adapted and extended to solve the project partner demands. In a first step huge three-dimensional laser datasets are registered in a geometrically correct way. Subsequently, novel methods have been developed enabling the extraction of relevant semantic relevant information. All sub-steps are performed automatically with with only minimal human interaction.
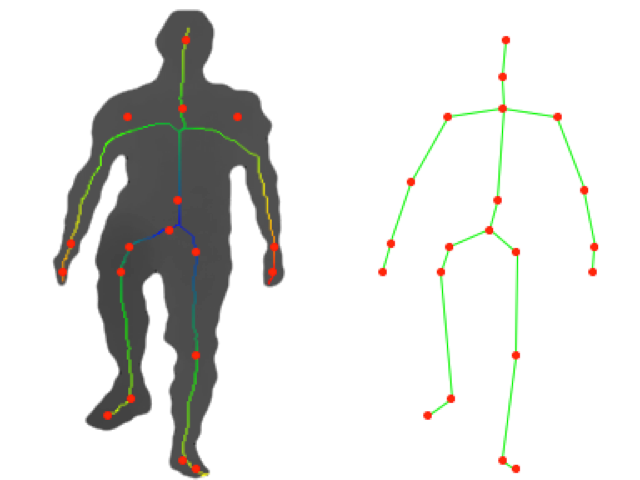
AdaptHS
The objective of the project is to develop a system solution for virtual rehabilitation support, which can be precisely adapted to the requirements of users. In this context, we develop a method for generating an individual skeletal model, which corresponds to the realities of representing people. The adaptation of the skeletal model is to be automated, thus enabling an accurate determination of the pose. Read more
© Universität Koblenz



