Zum Profil

Seminar - Semantics in 3D Scene Graphs
Organization
If you are interested in participating, please send an email with "[Seminar-SoSe25] <name>" to Nick Theisen by 06.04.2025. This is non-binding and only required for internal organization.
Further Information
- Max. 12 participants
- Registration via KLIPS (https://klips.uni-koblenz.de/v/162447)
- Kick-Off will take place on 17.04.2025 10:00 - 12:00 in room A120
Content
Motivation / Description
In this seminar, we will look into the crucial process of extracting and representing semantic information from 3D environments. As we move towards more intelligent and context-aware systems, the ability to derive meaningful, high-level understanding from raw sensor data becomes increasingly important. 3D semantic scene graphs are a powerful framework for encoding this extracted knowledge, bridging low-level perception with high-level reasoning.
This seminar explores the methods, challenges, and applications of semantic extraction in 3D scenes. We will examine how various techniques—from deep learning to knowledge-based approaches—can be employed to infer object categories, attributes, relationships, and contextual information. Students will investigate the interplay between geometry, appearance, and semantics, and how this integration enables more robust and versatile scene understanding. By focusing on semantic extraction, we aim to uncover the key to creating richer, more useful representations of our 3D world.
General Literature
I. Armeni et al., “3D Scene Graph: A Structure for Unified Semantics, 3D Space, and Camera,” in 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea (South): IEEE, Oct. 2019, pp. 5663–5672. doi: 10.1109/ICCV.2019.00576.
J. Wald, H. Dhamo, N. Navab, and F. Tombari, “Learning 3D Semantic Scene Graphs From 3D Indoor Reconstructions,” in 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA: IEEE, Jun. 2020, pp. 3960–3969. doi: 10.1109/CVPR42600.2020.00402.
N. Hughes, Y. Chang, and L. Carlone, “Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and Optimization,” in Robotics: Science and Systems XVIII, Robotics: Science and Systems Foundation, Jun. 2022. doi: 10.15607/RSS.2022.XVIII.050.
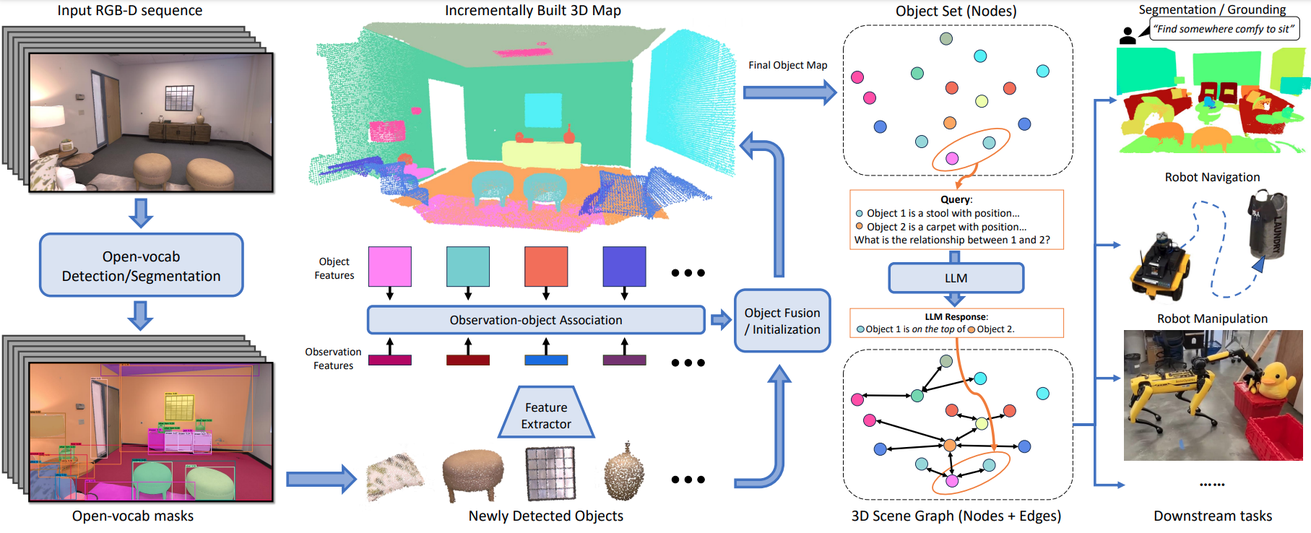
Q. Gu et al., "ConceptGraphs: Open-Vocabulary 3D Scene Graphs for Perception and Planning," 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 5021-5028, doi: 10.1109/ICRA57147.2024.10610243.
Prior Knowledge
- Proficiency in English language If required the seminar will be held in English. In any case, relevant literature will be in English.
- The seminar covers or is related to advanced computer vision, machine learning and robotics topics and a solid knowledge basis in these areas will be useful.
© Universität Koblenz



